
Bài 15 trang 83 Toán 12 tập 1 Cánh Diều
14:55:49Cập nhật: 22/10/2025
Bài toán này là một ứng dụng thực tế của vectơ trong không gian và điều kiện cân bằng lực để tìm tọa độ của ba lực $\vec{F_1}, \vec{F_2}, \vec{F_3}$ tác dụng lên giá đỡ ba chân của một chiếc máy. Với trọng lượng máy $P = 300\,\text{N}$, tổng các lực tác dụng lên máy phải bằng vectơ không (tổng ba lực $\vec{F_i}$ bằng vectơ trọng lực $\vec{F}$ hướng xuống).
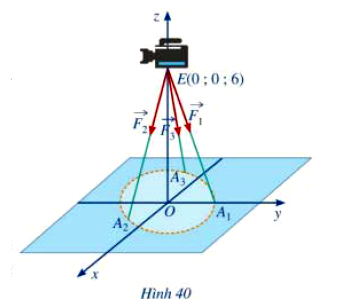
Tọa độ của các lực tác dụng lên giá đỡ là:
$\vec{F_1}$: $\mathbf{\left(0;\frac{50}{3};-100\right)}$
$\vec{F_2}$: $\mathbf{\left(\frac{25\sqrt{3}}{3};-\frac{25}{3};-100\right)}$
$\vec{F_3}$: $\mathbf{\left(-\frac{25\sqrt{3}}{3};-\frac{25}{3};-100\right)}$
• Xem thêm:
Đánh giá & nhận xét
Tin liên quan
 Bài 14 trang 83 Toán 12 tập 1 Cánh Diều
Bài 14 trang 83 Toán 12 tập 1 Cánh Diều Bài 13 trang 83 Toán 12 tập 1 Cánh Diều
Bài 13 trang 83 Toán 12 tập 1 Cánh Diều Bài 12 trang 83 Toán 12 tập 1 Cánh Diều
Bài 12 trang 83 Toán 12 tập 1 Cánh Diều Bài 11 trang 83 Toán 12 tập 1 Cánh Diều
Bài 11 trang 83 Toán 12 tập 1 Cánh Diều Bài 10 trang 82 Toán 12 tập 1 Cánh Diều
Bài 10 trang 82 Toán 12 tập 1 Cánh Diều Bài 9 trang 82 Toán 12 tập 1 Cánh Diều
Bài 9 trang 82 Toán 12 tập 1 Cánh Diều Bài 8 trang 82 Toán 12 tập 1 Cánh Diều
Bài 8 trang 82 Toán 12 tập 1 Cánh Diều Bài 7 trang 82 Toán 12 tập 1 Cánh Diều
Bài 7 trang 82 Toán 12 tập 1 Cánh Diều Bài 6 trang 82 Toán 12 tập 1 Cánh Diều
Bài 6 trang 82 Toán 12 tập 1 Cánh Diều Bài 5 trang 82 Toán 12 tập 1 Cánh Diều
Bài 5 trang 82 Toán 12 tập 1 Cánh Diều Bài 4 trang 82 Toán 12 tập 1 Cánh Diều
Bài 4 trang 82 Toán 12 tập 1 Cánh Diều Bài 3 trang 82 Toán 12 tập 1 Cánh Diều
Bài 3 trang 82 Toán 12 tập 1 Cánh Diều Bài 2 trang 82 Toán 12 tập 1 Cánh Diều: Tọa Độ Vectơ
Bài 2 trang 82 Toán 12 tập 1 Cánh Diều: Tọa Độ Vectơ Bài 1 trang 82 Toán 12 tập 1 Cánh Diều
Bài 1 trang 82 Toán 12 tập 1 Cánh Diều Bài 8 trang 81 Toán 12 tập 1 Cánh Diều
Bài 8 trang 81 Toán 12 tập 1 Cánh Diều Bài 7 trang 81 Toán 12 tập 1 Cánh Diều
Bài 7 trang 81 Toán 12 tập 1 Cánh Diều Bài 6 trang 81 Toán 12 tập 1 Cánh Diều
Bài 6 trang 81 Toán 12 tập 1 Cánh Diều Bài 5 trang 81 Toán 12 tập 1 Cánh Diều
Bài 5 trang 81 Toán 12 tập 1 Cánh Diều Bài 4 trang 80 Toán 12 tập 1 Cánh Diều
Bài 4 trang 80 Toán 12 tập 1 Cánh Diều Bài 3 trang 80 Toán 12 tập 1 Cánh Diều: Phép Toán Vectơ
Bài 3 trang 80 Toán 12 tập 1 Cánh Diều: Phép Toán Vectơ Bài 2 trang 80 Toán 12 tập 1 Cánh Diều
Bài 2 trang 80 Toán 12 tập 1 Cánh Diều Bài 1 trang 80 Toán 12 tập 1 Cánh Diều
Bài 1 trang 80 Toán 12 tập 1 Cánh Diều Bài 9 trang 73 Toán 12 tập 1 Cánh Diều
Bài 9 trang 73 Toán 12 tập 1 Cánh Diều Bài 8 trang 73 Toán 12 tập 1 Cánh Diều
Bài 8 trang 73 Toán 12 tập 1 Cánh Diều Bài 7 trang 73 Toán 12 tập 1 Cánh Diều
Bài 7 trang 73 Toán 12 tập 1 Cánh Diều- Bài 6 trang 73 Toán 12 tập 1 Cánh Diều
 Bài 5 trang 73 Toán 12 tập 1 Cánh Diều
Bài 5 trang 73 Toán 12 tập 1 Cánh Diều Bài 4 trang 72 Toán 12 tập 1 Cánh Diều
Bài 4 trang 72 Toán 12 tập 1 Cánh Diều Bài 3 trang 72 Toán 12 tập 1 Cánh Diều
Bài 3 trang 72 Toán 12 tập 1 Cánh Diều Bài 2 trang 72 Toán 12 tập 1 Cánh Diều
Bài 2 trang 72 Toán 12 tập 1 Cánh Diều Bài 1 trang 72 Toán 12 tập 1 Cánh Diều
Bài 1 trang 72 Toán 12 tập 1 Cánh Diều Bài 5 trang 64 Toán 12 tập 1 Cánh Diều
Bài 5 trang 64 Toán 12 tập 1 Cánh Diều Bài 4 trang 64 Toán 12 tập 1 Cánh Diều
Bài 4 trang 64 Toán 12 tập 1 Cánh Diều Bài 3 trang 63 Toán 12 tập 1 Cánh Diều
Bài 3 trang 63 Toán 12 tập 1 Cánh Diều Bài 2 trang 63 Toán 12 tập 1 Cánh Diều
Bài 2 trang 63 Toán 12 tập 1 Cánh Diều Bài 1 trang 63 Toán 12 tập 1 Cánh Diều
Bài 1 trang 63 Toán 12 tập 1 Cánh Diều Bài 14 trang 48 Toán 12 tập 1 Cánh Diều
Bài 14 trang 48 Toán 12 tập 1 Cánh Diều Bài 13 trang 48 Toán 12 tập 1 Cánh Diều
Bài 13 trang 48 Toán 12 tập 1 Cánh Diều Bài 12 trang 48 Toán 12 tập 1 Cánh Diều
Bài 12 trang 48 Toán 12 tập 1 Cánh Diều
Tin mới





Tin cùng chuyên mục





Tin xem nhiều nhất


Tuyển sinh
Phương trình đường tròn nội tiếp tam giác là một...
Kiến thức THPT
Phương trình đối xứng với sinx và cosx là một trong...

Kiến thức THCS
Căn bậc hai và căn bậc ba là những mảng kiến thức...


Trắc nghiệm online



Tin học


Ngoại ngữ

Trong tiếng Anh, việc sử dụng đúng các động từ thể...

Hướng nghiệp

AI (Artificial Intelligence) là ngành khoa học phát triển...

Góc chia sẻ - giải trí

Ho Chi Minh City is one of the most dynamic spots in Vietnam. There...


Video





